Search...
Menu
M9 AutoPilot User Manual
WenTian M9 AutoPilot Specifications
| Flight Controller Parameters | |
|---|---|
| Hardware Standard | FMU v6X |
| Main MCU | STM32H753 |
| IO MCU | STM32F103 |
| IMU Vibration Damping | Hengshu Damping Architecture |
| Accelerometer & Gyroscope | Triple-redundant IMU: SCH16T (Tactical Grade) + ADIS16507 (Industrial Grade) + IIM42653 (Industrial Grade) |
| Barometer | OneASP Pro ×2 + ICP20100 |
| Magnetometer (Compass) | RM3100 |
| PWM Relay | Yes |
| RC Receiver Protocol Input | SBUS, CRSF |
| Number of PWM Channels | 16 |
| PWM Level Switching | Supports switching between 3.3V and 5V |
| Power Interfaces | 2 Bus ports, 6 DroneCAN ports |
| Servo Voltage Monitoring | 9.9V |
| Operating Temperature | -20℃ to 85℃ |
| Operating Voltage | 4.6V - 5.4V (when not powered via the Hub) |
| Hub | |
| Interface Details | CAN1 port ×3, CAN2 port ×3, PWM (Servo) port ×16, Servo Power port ×1, SBUS IN ×1, Power port ×1, Power Monitoring port ×2, Main Power port ×1, Telem-TTL ×2, Telem-RS232 ×1, Telem-RS422 ×1, GPS1-TTL port ×1, GPS2-TTL port ×1, Ethernet port ×1, I2C port ×1, ADC port ×1, Type-C port ×1 |
| Flight Controller Voltage Input (via Hub) | 26V ±10V |
| Built-in RTK | |
| Supported Satellite Bands | GPS: L1C/A, L1C, L2C, L2PY, L5 GLONASS: L1CA, L2CA, L2P, L3CDMA Beidou: B1I, B1C, B2a, B2I, B2b, B3I Galileo: E1, E5a, E5b, E6 QZSS: L1C/A, L1 C/B, L2C, L5, L6 |
| Navigation Update Rate | 20Hz |
| Special Features | Anti-interference, Anti-spoofing |
| RTK Positioning Accuracy | Horizontal: 0.6 cm + 0.5 ppm Vertical: 1 cm + 1 ppm |
| Single Point Positioning Accuracy | Horizontal: 1.2m, Vertical: 1.9m |
| DGNSS Positioning Accuracy | Horizontal: 0.4m, Vertical: 0.7m |
| Velocity Accuracy | 3 cm/s |
| Heading Accuracy | At 1m baseline: 0.15° |
| Timing Accuracy | xPPS out: 5ns, Event accuracy < 20 ns |
| Time To First Fix | Cold start: < 45s, Hot start: < 20s, Re-acquisition: 1s |
| Data Protocols | DroneCAN Protocol SBF, NMEA 0183, v2.3, v3.03, v4.0 RTCM v3.x (MSM included) Input |
| Built-in Airspeed Sensor | |
| Airspeed Sensor Redundancy | Dual Sets |
| Airspeed Measurement Range | 0 to 439.9 km/h (122.2 m/s) |
| Maximum Error Band | ±0.15% |
| Temperature Compensation | Yes |
| Linear Calibration | Yes |
| Built-in Telemetry Link | |
| Communication Frequency | 902-928 MHz |
| Transmission Protocol | Transparent Transmission |
| Transmission Technology | Frequency Hopping |
| Communication Range | 60 km (Line of Sight, Good Electromagnetic Environment) |
| Output Power | 100 mW to 1 W (20-30 dBm), Factory default: 1 W |
| Air Data Rate | Up to 276 kbps |
| Receiver Sensitivity | -111 dBm @ 57.6 kbps -110 dBm @ 115.2 kbps -108 dBm @ 172.8 kbps -107 dBm @ 230.4 kbps -106 dBm @ 276 kbps |
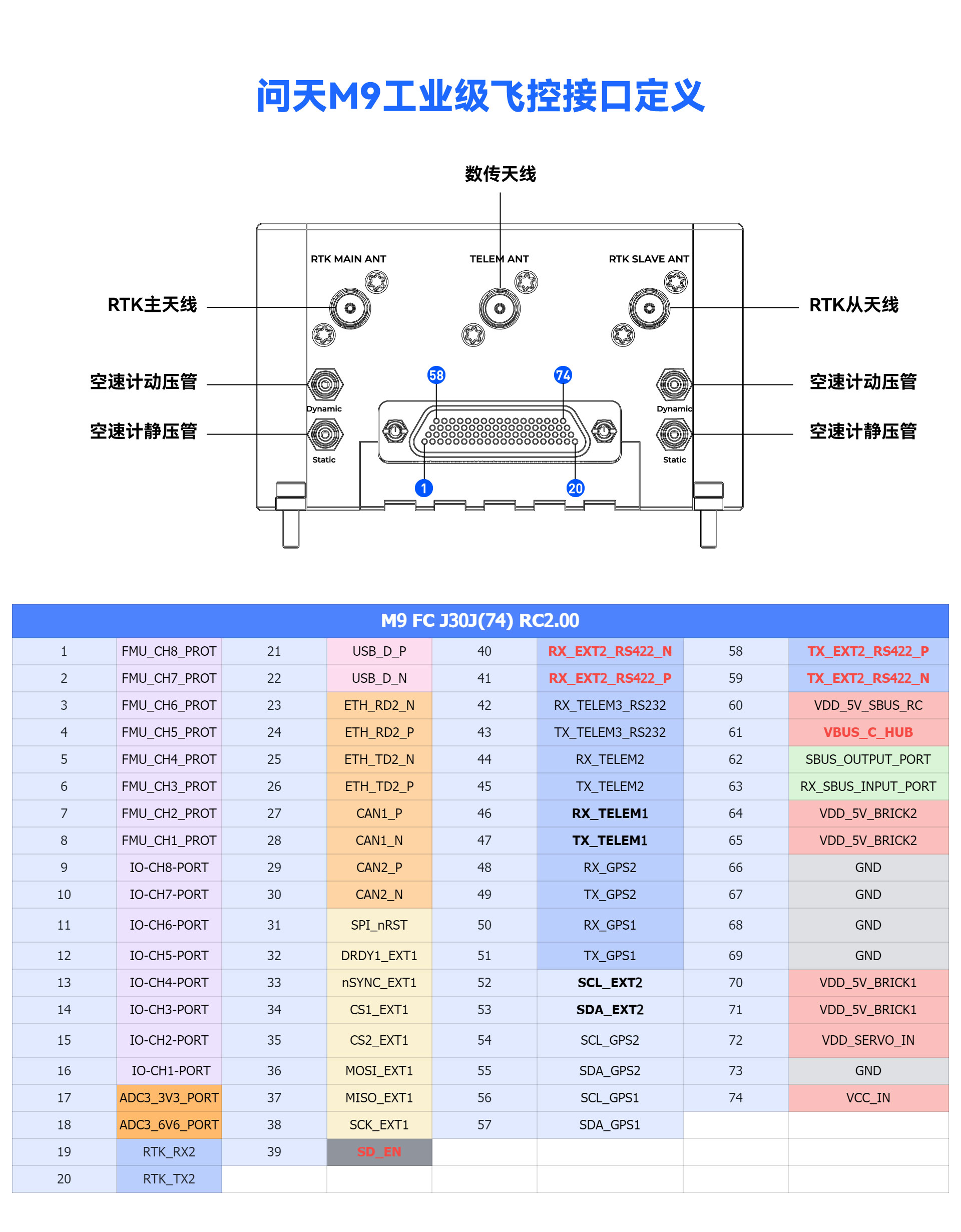
J30J Connector Pinout for Wentian M9 Flight Controller
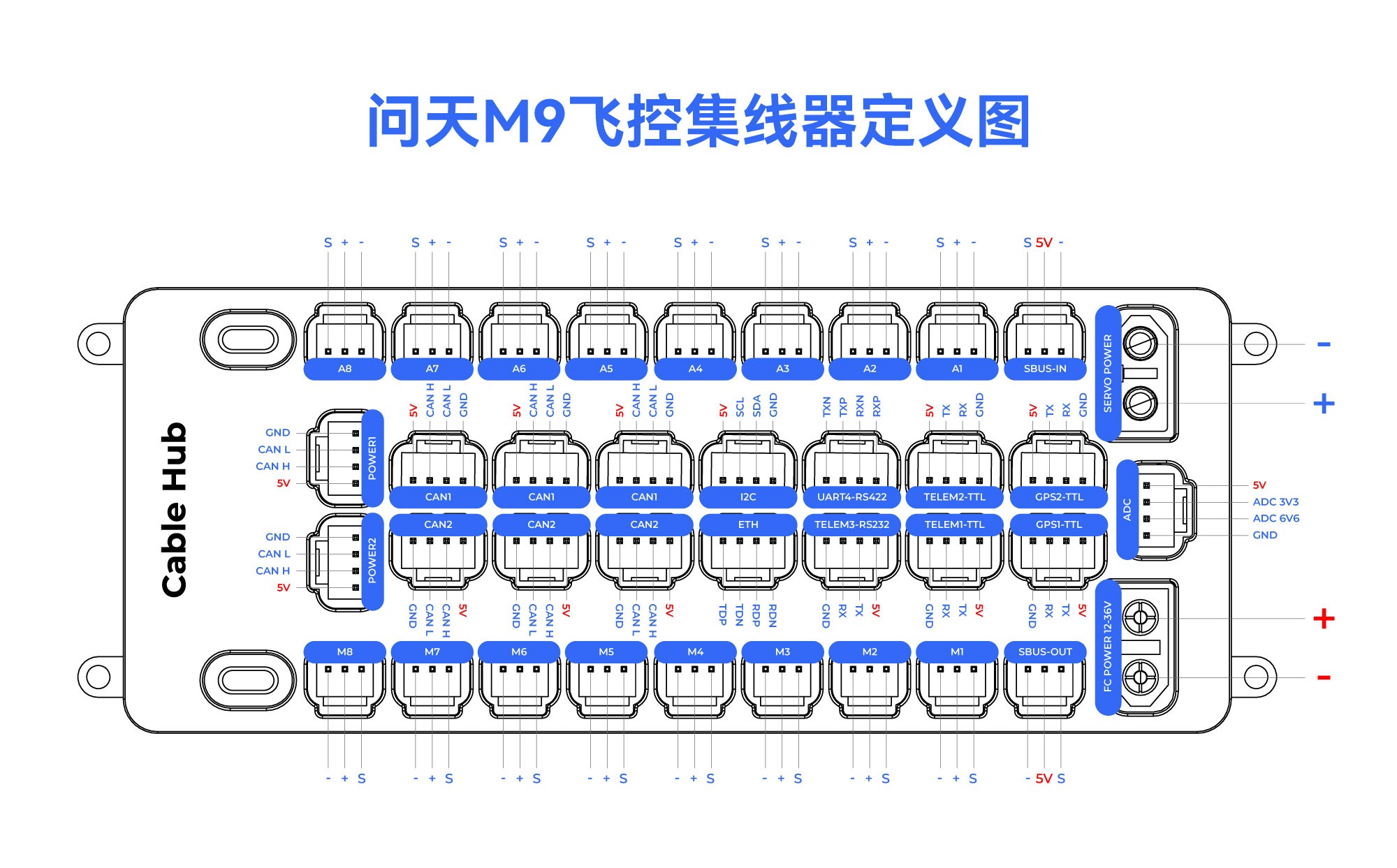
Hub Interface Pinout
To facilitate customer testing and use, the M9 Flight Controller is provided with a hub. The hub interface pinout is as follows:
Frequently Asked Questions
What is the model of the connectors used on the hub?
04R-JWPF-VSLE-S
What firmware is supported?
Currently, only ArduPilot firmware is supported. PX4 firmware support will be available in the future.
Previous
M9 AutoPilot
Next
M9 AutoPilot Readme
Last modified: 2026-07-26Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
Outline